STAT 4830: Numerical Optimization for Data Science and Machine Learning - Damek Davis
Lecture 11 Cheat Sheet: A Playbook for Tuning Deep Learning Models
1. Introduction: Beyond Algorithms to Process
- Problem: Deep learning success relies heavily on the process of tuning, which is often undocumented and ad-hoc. (Ref: Playbook Intro [1])
- Goal: Present a systematic, evidence-based workflow for tuning, based on the Deep Learning Tuning Playbook [1] and empirical findings [2, 3].
- Context: Builds on Lectures 6-9 (algorithms) and Lecture 10 (comparison challenges). Focuses on how to tune effectively and reproducibly.
Overall Workflow Visualization:
 Figure 1: Overview of the iterative tuning process based on the Deep Learning Tuning Playbook [1]. […] (See full caption in lecture notes)
Figure 1: Overview of the iterative tuning process based on the Deep Learning Tuning Playbook [1]. […] (See full caption in lecture notes)
2. Initial Setup: Foundational Choices
(Goal: Establish a simple, reasonable baseline before iterative tuning)
- Architecture (Sec 2.1):
- Start with established, standard architectures for the task.
- Defer custom architectures until later.
- Architecture choice implies a family (hyperparameters like layers/width tuned later).
- Optimizer (Sec 2.2):
- Start with popular, well-understood optimizers (SGD+Momentum, Adam, AdamW - See L7, L9).
- Consider the tuning effort trade-off: More complex optimizers (e.g., Adam: $η, \beta_1, \beta_2, \epsilon$) require tuning more hyperparameters than simpler ones (e.g., SGD+Momentum: $η, \beta$). (Ref: Playbook [1], implicitly Choi et al. [2])
- Option: Start simpler (e.g., Adam with fixed $\beta$s, $\epsilon$) if resources are limited initially.
- Batch Size (Sec 2.3):
- Primary role: Governs training speed & hardware use.
- NOT a hyperparameter for directly tuning validation performance. (Ref: Playbook [1], Shallue et al. [3])
- Comparable validation accuracy achievable across batch sizes IF other HPs (LR, regularization) are re-tuned. (Ref: Shallue et al. [3])
- Scaling Pattern: Steps vs. Batch Size shows: Perfect Scaling -> Diminishing Returns -> Maximal Parallelism.
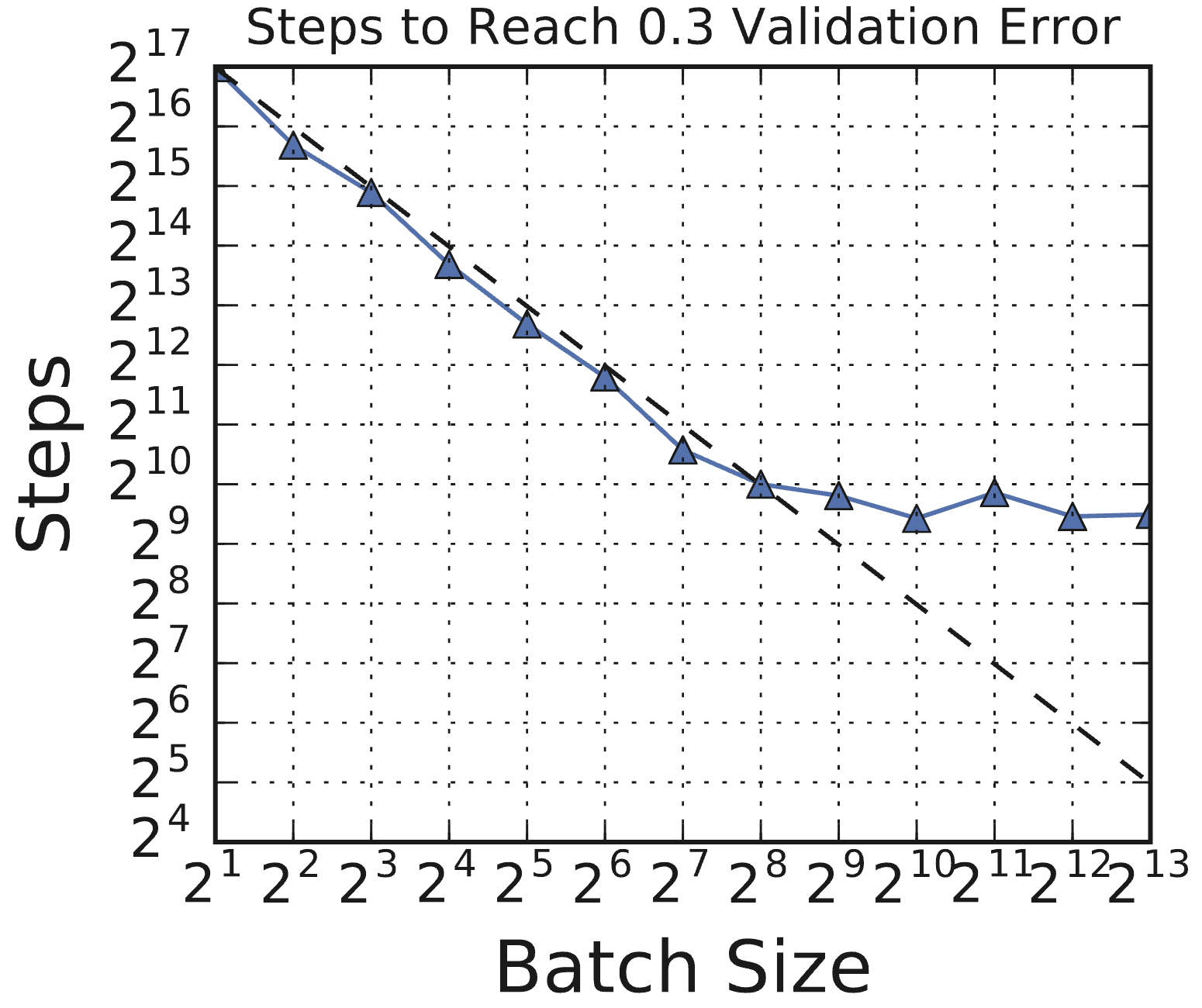 (Source: Shallue et al., 2018, Fig 1c)
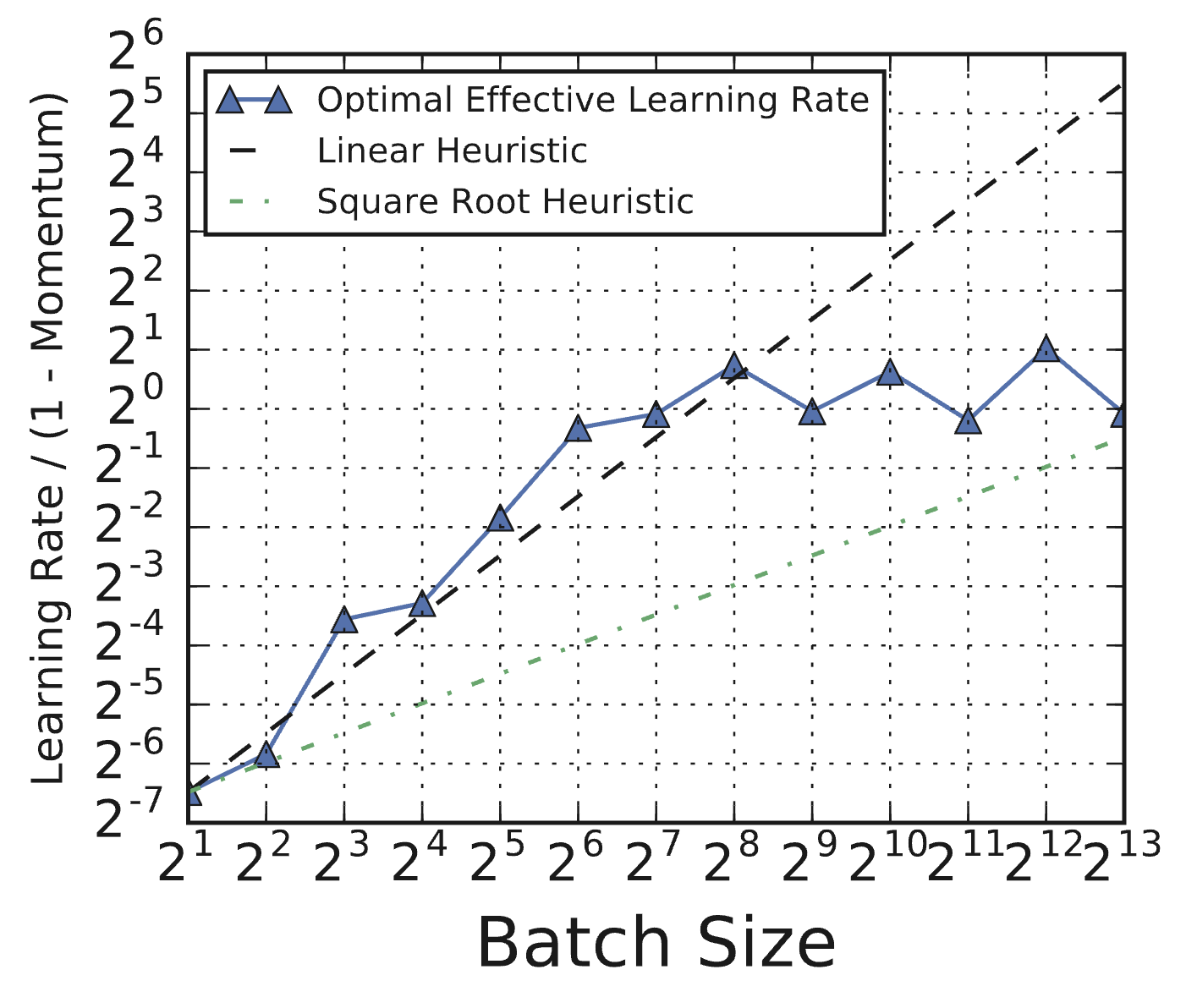
(Source: Shallue et al., 2018, Fig 1c) - Re-tuning Need: Optimal LR often doesn’t follow simple scaling heuristics (linear/sqrt). Regularization needs may also change.
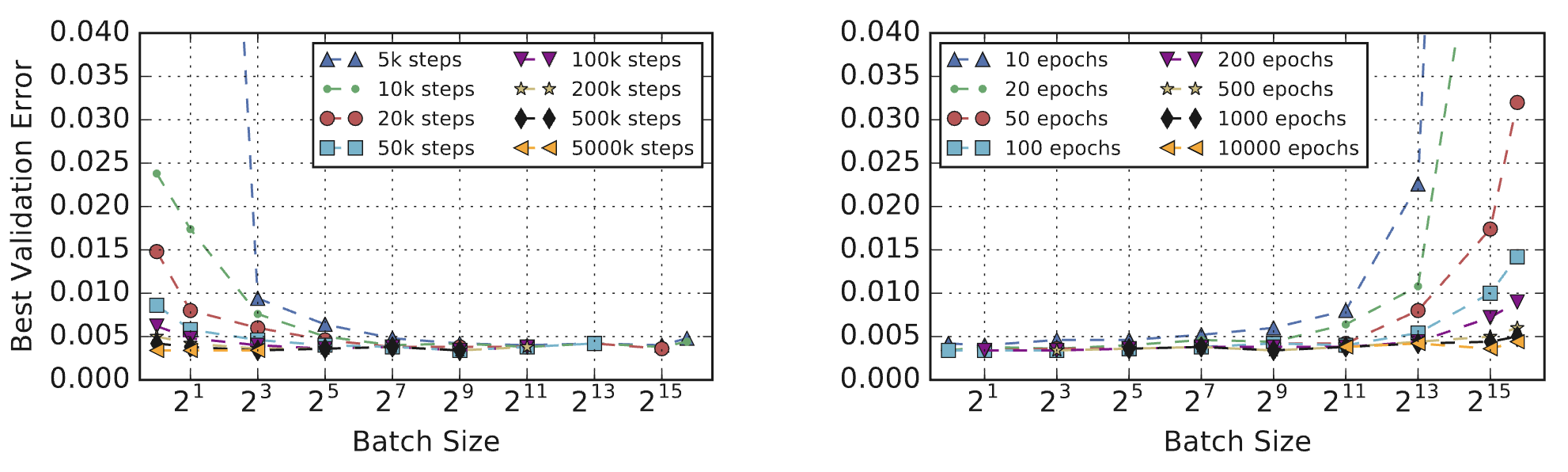
 (Source: Shallue et al., 2018, Fig 8c)
(Source: Shallue et al., 2018, Fig 8c) - Epoch budgets vs. Step budgets yield different optimal batch sizes regarding validation error. Step budgets align better with minimizing wall-clock time.
 (Source: Shallue et al., 2018, Fig 11a)
(Source: Shallue et al., 2018, Fig 11a)
- Initial Baseline (Sec 2.4):
- Aim for: Simple, Resource-Efficient, Reasonable Performance (better than chance).
- Start with minimal complexity (e.g., constant LR).
- Initial training steps: Trade-off between faster iteration vs. easier schedule tuning (more in Sec 4).
3. The Tuning Process: Iterative & Scientific (Ref: Fig 1 Workflow)
(Goal: Improve performance incrementally via exploration and evidence-based decisions)
- Incremental Strategy (Sec 3.1):
- Start simple (baseline).
- Introduce changes one at a time.
- Adopt changes (“launch” new baseline) only based on strong evidence of improvement.
- Avoids unnecessary complexity.
- Exploration > Exploitation (Sec 3.2):
- Focus: Most time spent on Exploration (gaining insight into the problem) not Exploitation (greedy optimization).
- Benefits: Understand HP sensitivity/interactions, identify issues (overfitting), avoid spurious improvements, know when tuning saturates.
- Structuring Experiments (Sec 3.3):
- Organize into “rounds” with a single, narrow goal.
-
Hyperparameter Roles (per round):
- Scientific: Effect being investigated. - Nuisance: Must be optimized over for fair comparison. - Fixed: Held constant (introduces caveats). - Role depends on the goal (e.g., testing weight decay: presence=scientific, strength $λ$=nuisance).
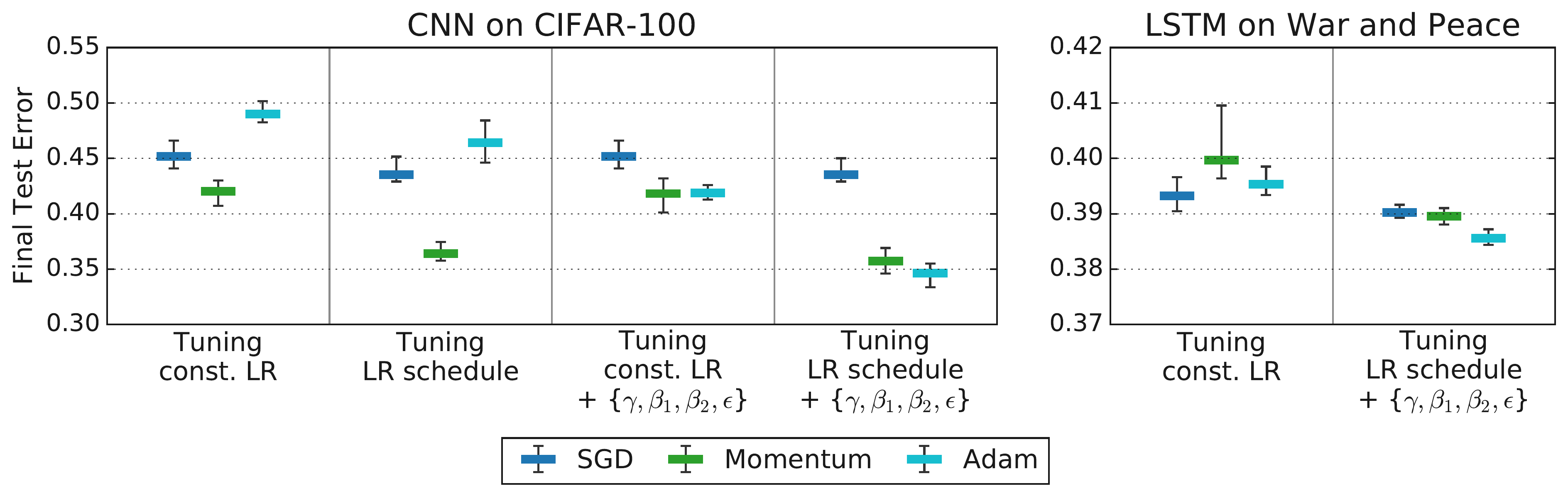
- Critical Importance of Tuning Nuisance HPs: Fair comparison requires optimizing interacting nuisance HPs (like LR) for each setting of the scientific HP. Insufficient tuning leads to unreliable conclusions. (Ref: Choi et al. [2])
 (Source: Choi et al., 2019b, Fig 3)
(Source: Choi et al., 2019b, Fig 3) - Tuning Protocol is Part of the Algorithm: Optimizer rankings depend heavily on the search space, budget, and method used for tuning. Comparisons are only valid if the protocol is defined and consistent. (Ref: Choi et al. [2])
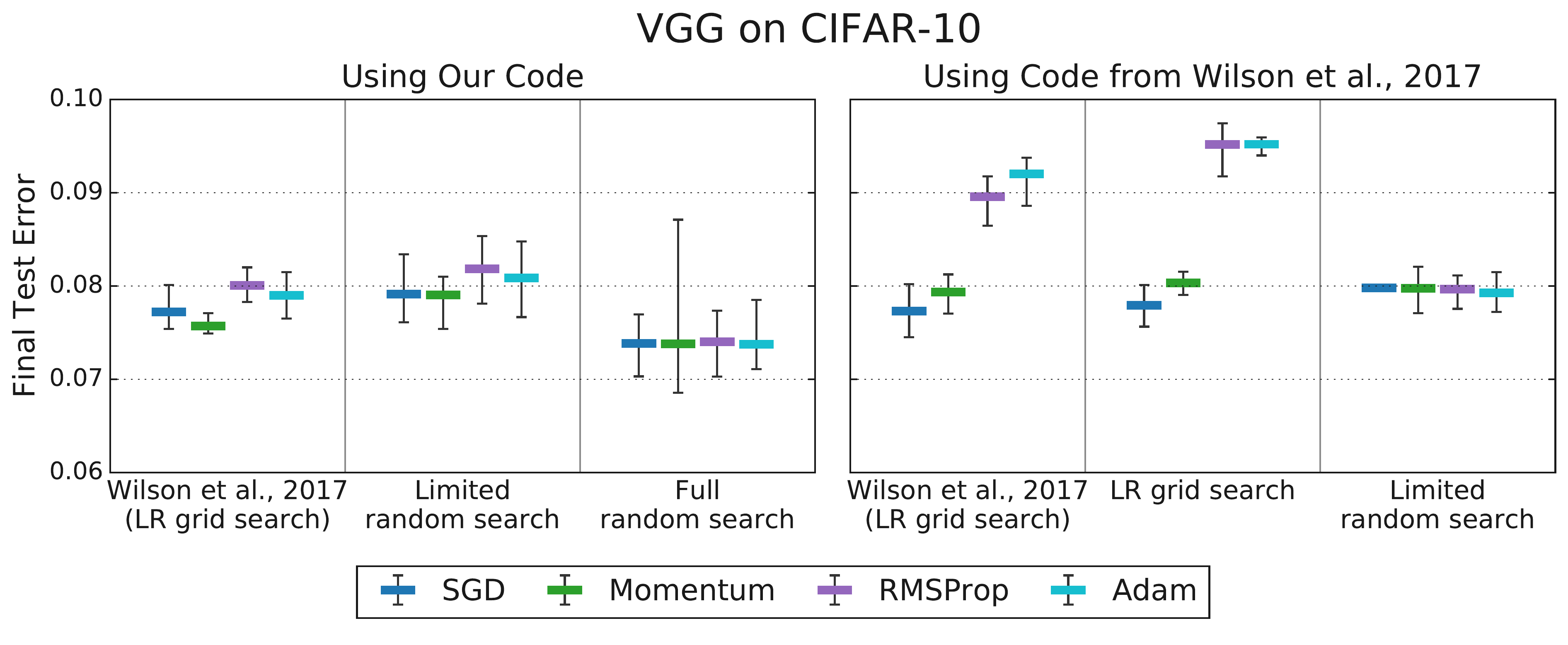
 (Source: Choi et al., 2019b, Fig 4)
(Source: Choi et al., 2019b, Fig 4) - Trade-offs: Balancing resources vs. caveats when deciding nuisance vs. fixed HPs. Optimizer HPs often nuisance; Arch HPs often scientific/fixed.
- Conditional HPs: Some HPs only exist for certain scientific HP values (e.g., Adam’s βs).
- Designing Studies (Sec 3.4):
- Study = set of trials (configurations).
- Goal: Compare scientific HPs by optimizing over nuisance HPs.
- Search Method:
- Exploration Phase: Use Quasi-Random Search (non-adaptive, uniform coverage, good for parallelism/analysis). (Ref: Playbook [1], Bousquet et al. [4])
- Exploitation Phase: Use Bayesian Optimization (adaptive, focuses search). (Ref: Playbook [1], Gelbart et al. [5])
- Budget Allocation: Balance # scientific values vs. nuisance space size vs. sampling density.
- Analyzing Results (Sec 3.5):
- Go beyond the primary goal; look for insights & issues.
- Check Search Boundaries: Use axis plots (Perf vs. HP). Best trials near edge? -> Expand space.
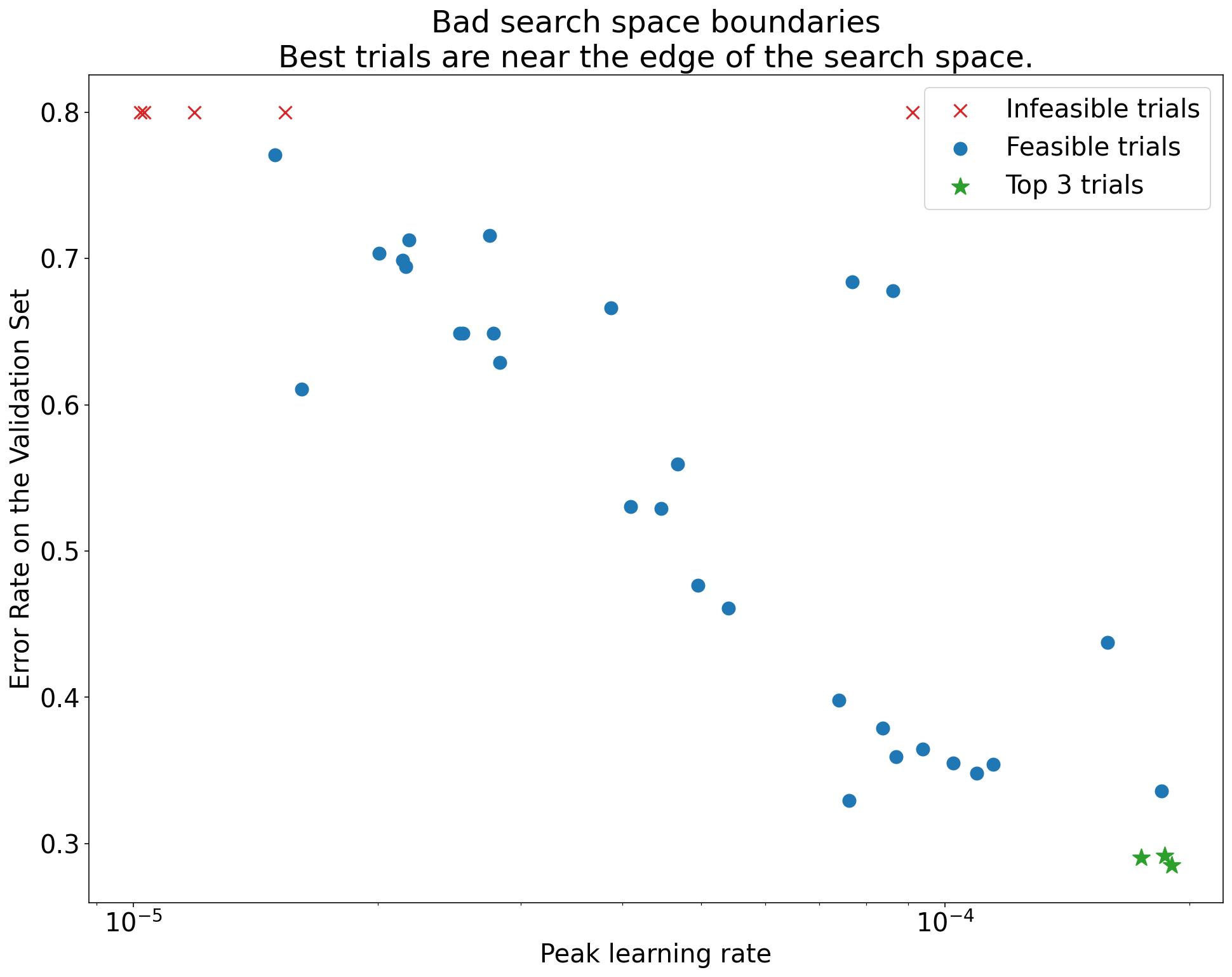
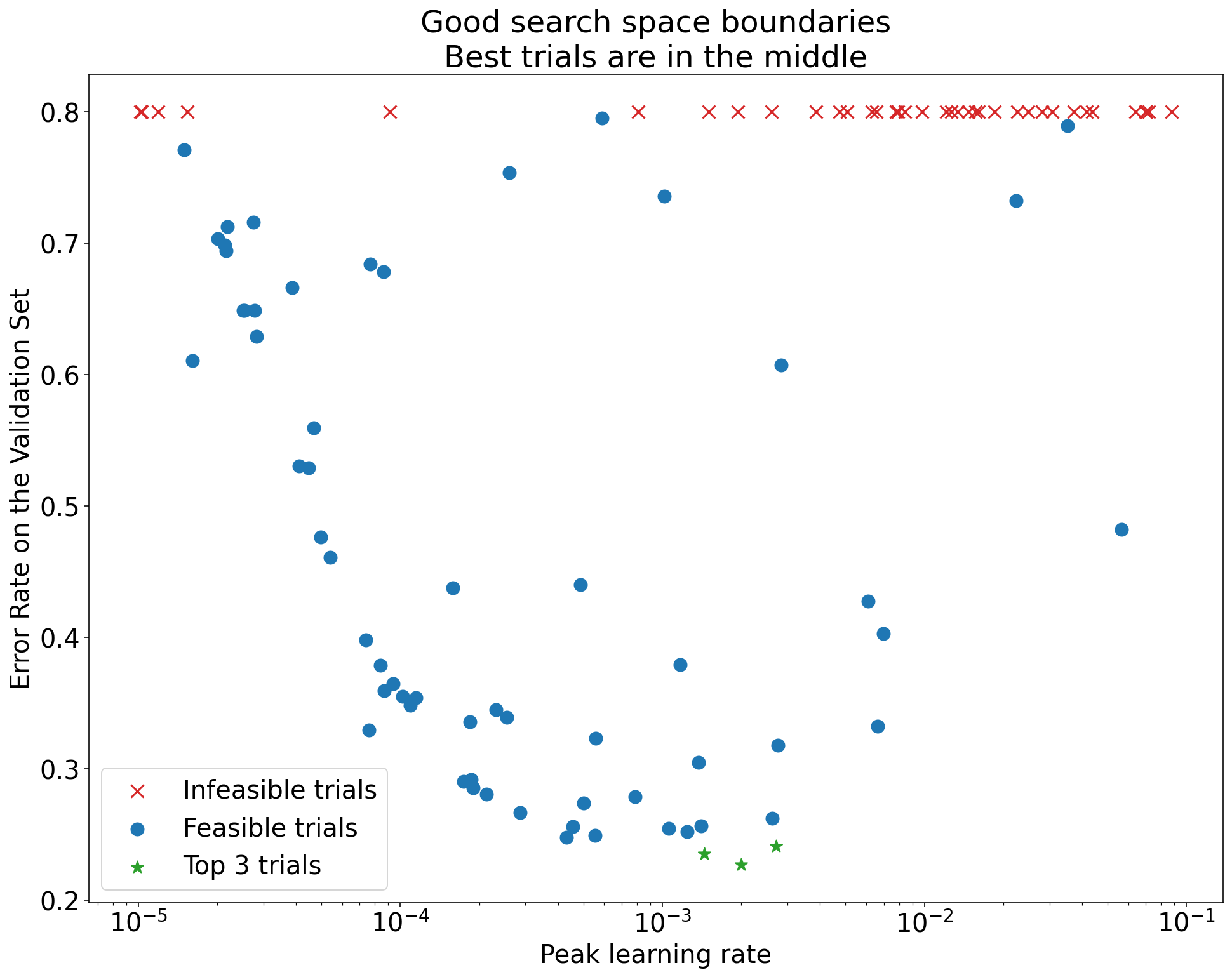 (Caption: See Lecture Notes Figure 6)
(Caption: See Lecture Notes Figure 6) - Check Sampling Density: Is the “good” region well-covered? (Hard to quantify, use plots).
- Examine Training/Validation Curves (Best Trials):
- Problematic Overfitting? (Val loss increases) -> Need more regularization.
- High Variance? (Noisy curves) -> Affects comparison; consider ↑BS, LR decay, Polyak avg.
- Still Improving? -> Maybe need more steps (Sec 4).
- Saturated Early? -> Maybe too many steps (Sec 4).
- Use Isolation Plots: Compare scientific HPs after optimizing nuisance HPs.
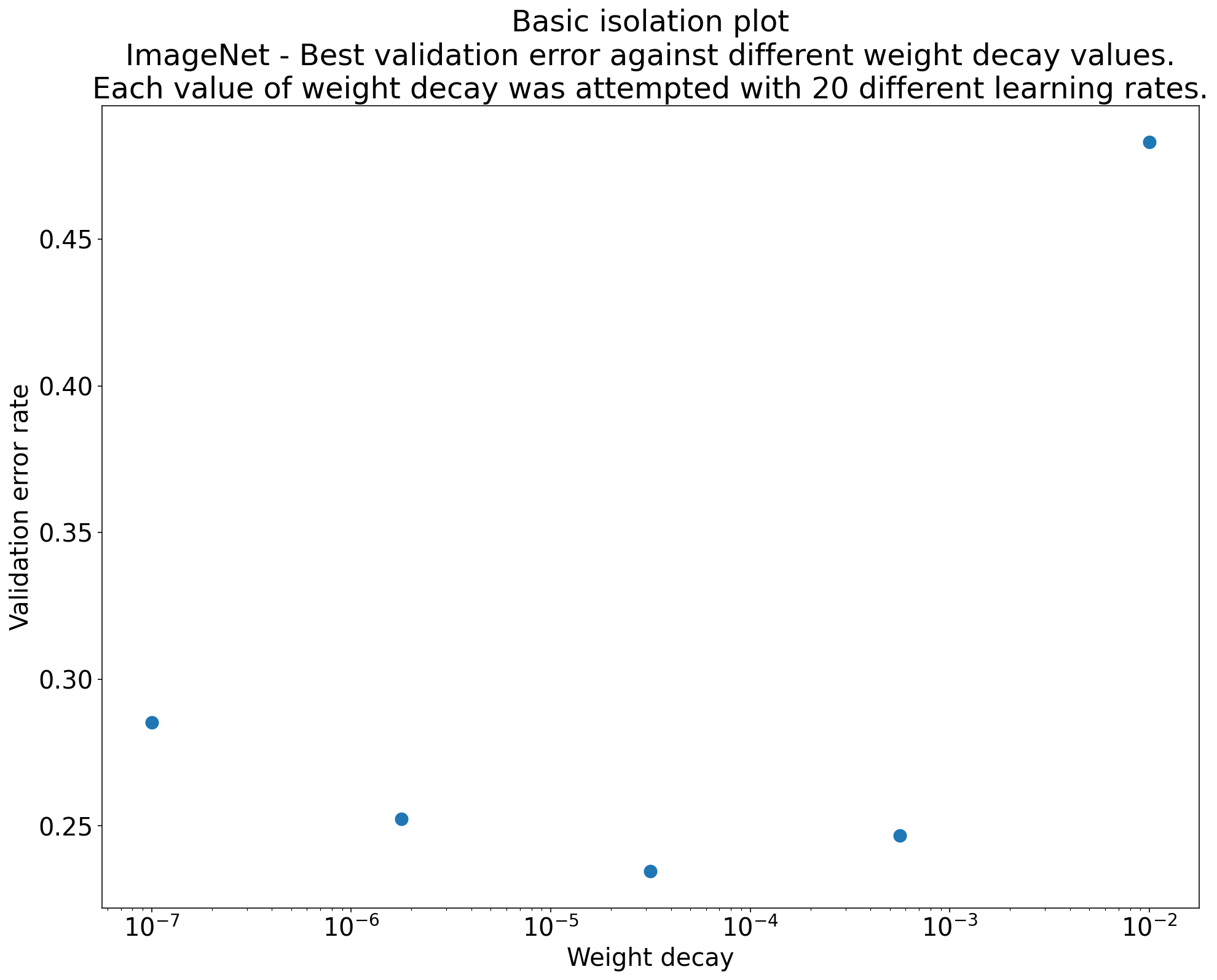 (Caption: See Lecture Notes Figure 7)
(Caption: See Lecture Notes Figure 7)
- Making Decisions (Sec 3.6):
- Adopt change if improvement > variance (trial & study) and worth added complexity.
- Characterize trial variance by rerunning best trials if feasible.
4. Determining Training Duration
- Regimes: Compute-bound (longer helps) vs. Not compute-bound (performance saturates).
- Protocol:
- Use a fixed
max_train_stepsfor all trials within a study. - Do NOT tune
max_train_stepsas a hyperparameter within the study. - Use retrospective checkpoint selection (save best checkpoint based on validation performance during the run).
- Observe where best checkpoints land to inform
max_train_stepsfor future rounds. - Interacts strongly with LR decay schedule tuning.
- Use a fixed
5. Conclusion
- Effective tuning is a systematic, iterative, scientific process, not random tweaking. (Ref: Playbook [1])
- Focus on exploration & insight for most of the process.
- The tuning protocol IS part of the algorithm for empirical comparisons. Fair comparisons require tuning nuisance HPs. (Ref: Choi et al. [2])
- Adopt changes based on evidence, considering variance and complexity.