Slide 1: Scaling Transformers: Parallelism Strategies from the Ultrascale Playbook
(Based on Hugging Face Ultrascale Playbook)
Goal: Understand why and how we train massive AI models across many computers.
Slide 2: The Scaling Challenge
Why are we here?
- Modern AI models (like Transformers) are HUGE (Billions/Trillions of parameters!).
- Too big for one computer (specifically, one GPU’s memory).
- Need to split the work across many GPUs/computers.
Today’s Focus:
- System-level challenges & strategies for distributed training.
- How to manage computation & memory across devices.
- (Not focusing on the optimization math itself).
Core Resource: Hugging Face Ultrascale Playbook (link)
Slide 3: What IS a Transformer? (The Big Picture)
Purpose: Process sequences (like text) and understand relationships between elements (words).
Core Idea: Input sequence -> Embeddings -> Many Transformer Blocks -> Output Layer
 (A simple block diagram showing Input -> Embedding -> L x Blocks -> Output)
(A simple block diagram showing Input -> Embedding -> L x Blocks -> Output)
Key: The “Transformer Block” is where most complexity and computation happens. We stack many ($L$) of these blocks.
Slide 4: Transformer Anatomy 1: Input & Embedding
Input: Sequence of tokens (integer IDs): $x = (x_1, \dots, x_s)$ (length $s$)
1. Embedding Layer:
- Map each token ID $x_i$ to a vector.
- Uses a learnable matrix $W_E \in \mathbb{R}^{V_{size} \times h}$.
- $V_{size}$: Vocabulary size (how many unique words/tokens)
- $h$: Hidden dimension (size of the vector for each token)
- Result: $H^{(0)}_{\text{embed}} \in \mathbb{R}^{s \times h}$ (a sequence of vectors)
2. Positional Encoding:
- Transformers don’t inherently know word order. Add position info!
- Uses fixed or learned vectors $P \in \mathbb{R}^{s \times h}$.
- Resulting initial representation: $H^{(0)} = \text{Embed}(x) + P \in \mathbb{R}^{s \times h}$
Parameters here: Mostly $W_E$ (can be large if $V_{size}$ is big).
Slide 5: Transformer Anatomy 2: Layer Normalization (LN)
Purpose: Stabilizes training, helps gradients flow. Applied before main sub-layers (Pre-LN).
What it does: Normalizes features across the hidden dimension ($h$) for each token independently.
Input: Tensor $Z \in \mathbb{R}^{s \times h}$ (e.g., $H^{(l-1)}$) Output: Normalized Tensor $\text{LN}(Z) \in \mathbb{R}^{s \times h}$
Formula (for token $i$): \(\text{LN}(Z)_i = \gamma \odot \frac{Z_i - \mu_i}{\sqrt{\sigma_i^2 + \epsilon}} + \beta\)
- $\mu_i, \sigma_i^2$: Mean/Variance across hidden dim $h$ for token $i$.
- $\gamma, \beta \in \mathbb{R}^h$: Learnable scale & shift parameters (element-wise $\odot$).
- $\epsilon$: Small constant for stability.
Parameters per LN layer: $2h$ (from $\gamma, \beta$). Used multiple times in each block!
Slide 6: Transformer Anatomy 3: The Transformer Block
Core Unit: Repeated $L$ times. Input $H^{(l-1)}$, Output $H^{(l)}$. Two Main Sub-Layers:
- Multi-Head Self-Attention (MHA)
- Position-wise Feedforward Network (FFN)
Structure (Pre-LN Variant):
Input H^(l-1) --> LN1 --> MHA --> Add (*) --> LN2 --> FFN --> Add (**) --> Output H^(l)
| | | |
+---------+ (Residual 1) +---------+ (Residual 2)
- LN1, LN2: Layer Normalization.
- Add (*, **): Residual Connections (add input to output of sub-layer). Crucial for depth!
Slide 7: Transformer Anatomy 4: Multi-Head Attention (MHA) - Part 1
Purpose: Allows each token to look at other tokens in the sequence and decide which are important (“attend to”).
Input: Normalized $ X’ = \text{LN}_1(H^{(l-1)}) $
1. Create Query, Key, Value vectors:
- Linearly project $X’$ using learnable weights $W_Q, W_K, W_V \in \mathbb{R}^{h \times h}$.
\(Q = X' W_Q, \quad K = X' W_K, \quad Val = X' W_V\)
- $Q$: What I’m looking for.
- $K$: What I contain.
- $Val$: What I’ll give you if you attend to me.
2. Split into Multiple Heads:
- Divide $Q, K, Val$ (dim $h$) into $a$ smaller chunks (“heads”) along the hidden dim.
- $Q_i, K_i, Val_i \in \mathbb{R}^{s \times d_k}$ where $d_k = h/a$.
- Why heads? Allows model to focus on different types of relationships simultaneously.
Parameters: $W_Q, W_K, W_V$ (total $3h^2$).
Slide 8: Transformer Anatomy 5: Multi-Head Attention (MHA) - Part 2
3. Scaled Dot-Product Attention (per head $i$):
- Calculate attention scores: How much should query $q$ attend to key $k$? \(\text{RawScores}_i = Q_i K_i^T \in \mathbb{R}^{s \times s}\)
- Scale scores (stabilizes gradients): Divide by $\sqrt{d_k}$.
- Normalize scores (sum to 1 per query): Apply Softmax row-wise. \(\text{Scores}_i = \text{softmax}_{\text{keys}}\left(\frac{Q_i K_i^T}{\sqrt{d_k}}\right) \in \mathbb{R}^{s \times s}\)
4. Get Weighted Values:
- Multiply scores by Value vectors:
\(O_i = \text{Scores}_i \cdot Val_i \in \mathbb{R}^{s \times d_k}\)
- Output is weighted sum of values, based on attention scores.
Computation: Matrix Multiplies ($QK^T$, $\text{Scores} \cdot Val$) are dominant. $QK^T$ scales with $s^2$!
Slide 9: Transformer Anatomy 6: Multi-Head Attention (MHA) - Part 3
5. Concatenate Heads:
- Combine outputs from all heads back together: \(O_{concat} = \text{Concat}(O_1, \dots, O_a) \in \mathbb{R}^{s \times h}\)
6. Final Output Projection:
- Apply one more linear layer $W_O \in \mathbb{R}^{h \times h}$: \(O_{MHA} = O_{concat} W_O\)
7. Add Residual:
- $H_{intermediate} = H^{(l-1)} + O_{MHA}$ (Connect back to block input)
Parameters: $W_O$ ($h^2$). Total MHA params: $4h^2$ (ignoring biases). Key Computations: Projections (Q, K, V, O), Attention ($QK^T$, Score*V).
Slide 10: Transformer Anatomy 7: Feedforward Network (FFN)
Purpose: Process information for each token independently after attention. Adds representational capacity.
Input: Normalized $ X’’ = \text{LN}_2(H_{intermediate})$
Structure: Two linear layers with a non-linearity (e.g.,GELU) in between. \(O_{FFN} = \text{GELU}(X'' W_1 + b_1) W_2 + b_2\)
- $W_1 \in \mathbb{R}^{h \times d_{ff}}$, $b_1 \in \mathbb{R}^{d_{ff}}$ (Expand dimension)
- $W_2 \in \mathbb{R}^{d_{ff} \times h}$, $b_2 \in \mathbb{R}^{h}$ (Contract back to $h$)
- $d_{ff}$ is the intermediate “feedforward dimension”, often $d_{ff}=4h$.
Add Residual:
- $H^{(l)} = H_{intermediate} + O_{FFN}$ (Output of the block)
Parameters: $W_1, b_1, W_2, b_2$ (Roughly $2 \times h \times d_{ff} \approx 8h^2$ params). Computation: Dominated by two large matrix multiplies.
Slide 11: Transformer Anatomy 8: Final Layers, Loss, & Summary
After Last Block ($L$):
- Optional Final LayerNorm: $H’_{final} = \text{LN}_{final}(H^{(L)})$
- Output Layer: Project to final task output (e.g., vocabulary logits for language modeling).
- Uses $W_{LM} \in \mathbb{R}^{h \times V_{size}}$ (often tied/shared with $W_E$).
- $ \text{Logits} = H’_{final} W_{LM} \in \mathbb{R}^{s \times V_{size}}$
- Each row $\text{Logits}_i \in \mathbb{R}^{V_{size}}$ contains scores for each possible next token at position $i$.
Calculating the Loss (How the model learns):
- Purpose: Quantify how wrong the model’s predictions are compared to the actual target sequence.
- Input:
- Model $\text{Logits} \in \mathbb{R}^{s \times V_{size}}$.
- Target sequence (true next tokens): $y = (y_1, \dots, y_s)$, where $y_i$ is the integer index of the correct token at position $i$.
- Common Loss Function (Language Modeling): Cross-Entropy Loss
- Compares the predicted probability distribution (derived from logits via Softmax) with the target (which is 1 for the correct token, 0 otherwise).
- Formula (average over sequence):
\(\ell(W) = -\frac{1}{s} \sum_{i=1}^s \log \left( \frac{\exp(\text{Logits}_{i, y_i})}{\sum_{j=1}^{V_{size}} \exp(\text{Logits}_{i, j})} \right)\)
- Essentially: Maximize the log-probability of the correct next token $y_i$ at each position $i$.
- Goal of Training: Find model parameters $W = {W_E, W_Q, …, W_{LM}}$ that minimize this loss $\ell(W)$. Backpropagation calculates $\nabla_W \ell$.
Parameter Summary (Same as before):
- Embeddings: $W_E$ ($V_{size}h$)
- MHA Layers (per block): $W_Q, W_K, W_V, W_O$ ($4h^2$)
- FFN Layers (per block): $W_1, W_2$ (~$8h^2$)
- LayerNorms (per LN): $\gamma, \beta$ ($2h$)
- Output Projection: $W_{LM}$ ($h V_{size}$)
- Total: Scales roughly as $O(V_{size}h + Lh^2)$.
Computation Summary (Same as before):
- Matrix Multiplies in MHA ($QK^T$, Score*V)
- Matrix Multiplies in FFN ($XW_1$, $HW_2$)
- Repeated $L$ times! + Final Projection + Loss Calc.
Slide 12: Transformer Anatomy 9: Common Modifications
1. Attention Masking:
- Purpose: Control which tokens can attend to which others.
- How: Add large negative values ($-\infty$) to attention scores before softmax. \(\text{Scores}_i = \text{softmax}_{\text{keys}}\left(\frac{Q_i K_i^T}{\sqrt{d_k}} + M\right)\)
- Example: Causal Mask (for Autoregressive LM): Prevent attending to future tokens ($M_{jk} = -\infty$ if $k > j$).
- Doesn’t add parameters, changes computation slightly.
2. Dropout:
- Purpose: Regularization during training (prevent overfitting).
- How: Randomly set some activation values to 0, scale the rest.
- Applied after MHA output, within FFN, etc.
- Deactivated during inference (testing).
- Adds one hyperparameter (dropout rate $p$).
Slide 13: The Memory Bottleneck: Activations!
Problem: Training needs gradients ($\nabla_w \ell$). Backpropagation computes them using the chain rule.
Key Requirement: Backprop needs intermediate values (“activations”) computed during the forward pass.
Example: To compute $\nabla_W$ for $Y=XW$, we need $X$. To compute $\nabla_X$, we might need $Y$ or internal values.
Consequence: We must store many intermediate tensors ($Q, K, V$, attention scores, FFN hidden states, layer outputs $H^{(l)}$, etc.) until they’re used in the backward pass.
This takes a LOT of memory!
Slide 14: Activation Memory vs. Parameter Memory
Activation Memory:
- Stores intermediate results from forward pass.
- Depends on:
- Batch Size (
b) - Sequence Length (
s) - Hidden Dimension (
h) - Number of Layers (
L)
- Batch Size (
- Scales Roughly: $O(L \times b \times s \times h)$ (plus terms like $b \times a \times s \times s$ for attention scores!)
- Grows with batch size
band sequence lengths!
Parameter Memory:
- Stores model weights ($W_E, W_Q, …$).
- Depends on: $V_{size}, h, L, d_{ff}$.
- Scales Roughly: $O(V_{size}h + Lh^2)$.
- Independent of batch size
band sequence lengths!
The Bottleneck: For large models/batches/sequences, Activation Memory » Parameter Memory. This limits what fits on a single GPU.
Slide 15: Solution 1: Activation Recomputation (Gradient Checkpointing)
Idea: Trade compute time for memory savings.
How:
- Forward Pass: Compute as usual, but don’t store all intermediate activations. Store only a few strategic ones (e.g., inputs to major blocks $H^{(l-1)}$).
- Backward Pass: When a needed activation wasn’t stored, recompute it on the fly by running a small part of the forward pass again, starting from the nearest stored activation.
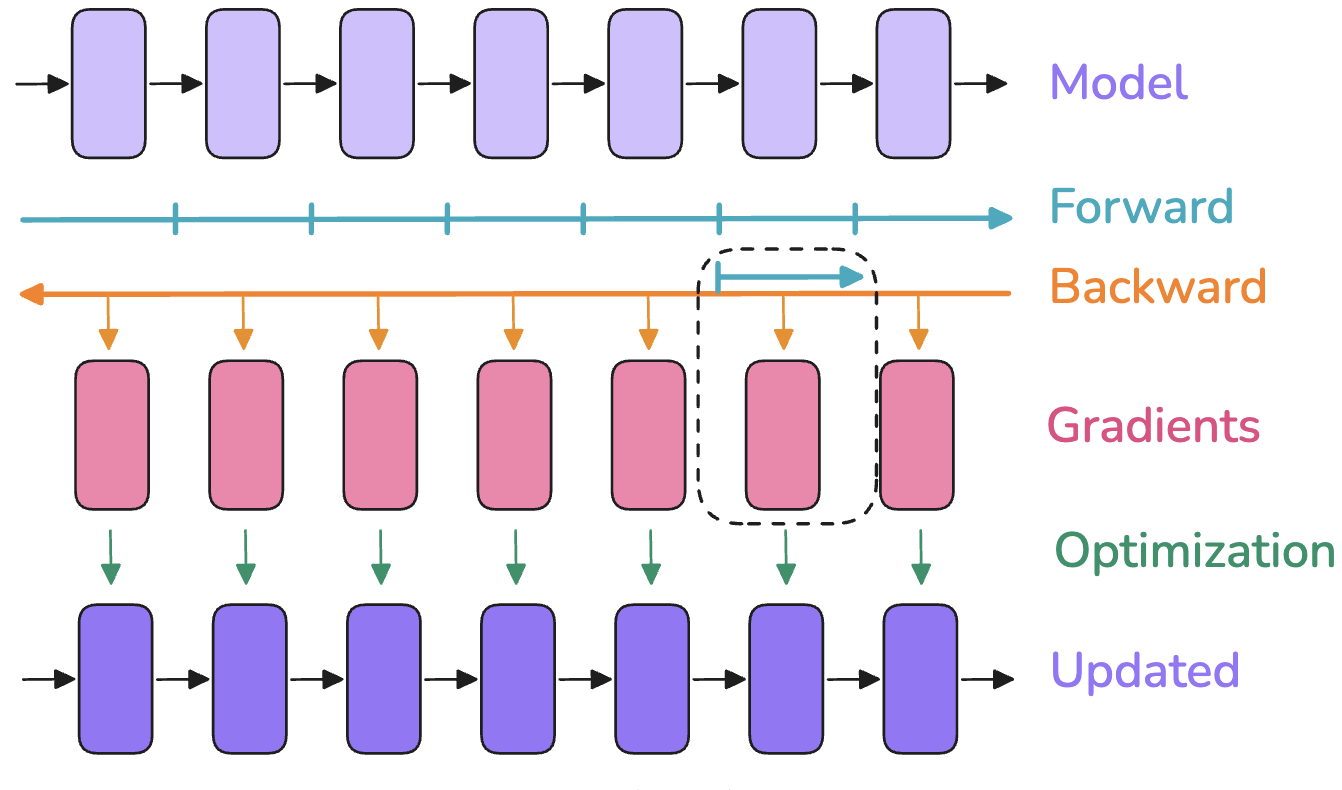 (Top: Standard backprop stores everything. Bottom: Recomputation stores less, recomputes needed values during backward pass.)
(Top: Standard backprop stores everything. Bottom: Recomputation stores less, recomputes needed values during backward pass.)
Trade-off:
- Pro: Significantly reduces activation memory footprint.
- Con: Increases computation time (roughly adds one extra forward pass for recomputed segments).
- Often essential for training very large models.
Reference: Playbook Section
Slide 16: Toolbox: Distributed Communication Primitives (Why?)
Problem: We need multiple GPUs (workers) to cooperate. They need to exchange data.
Solution: Use standard communication patterns (“collectives”).
Context:
- Group of $N$ workers, each with a rank (0 to $N-1$).
- Usually implemented by libraries like NCCL for high-speed GPU communication.
Understanding these is key to understanding parallelism strategies!
Reference: Playbook Appendix A0
Slide 17: Primitives 1: Broadcast & Reduce/AllReduce
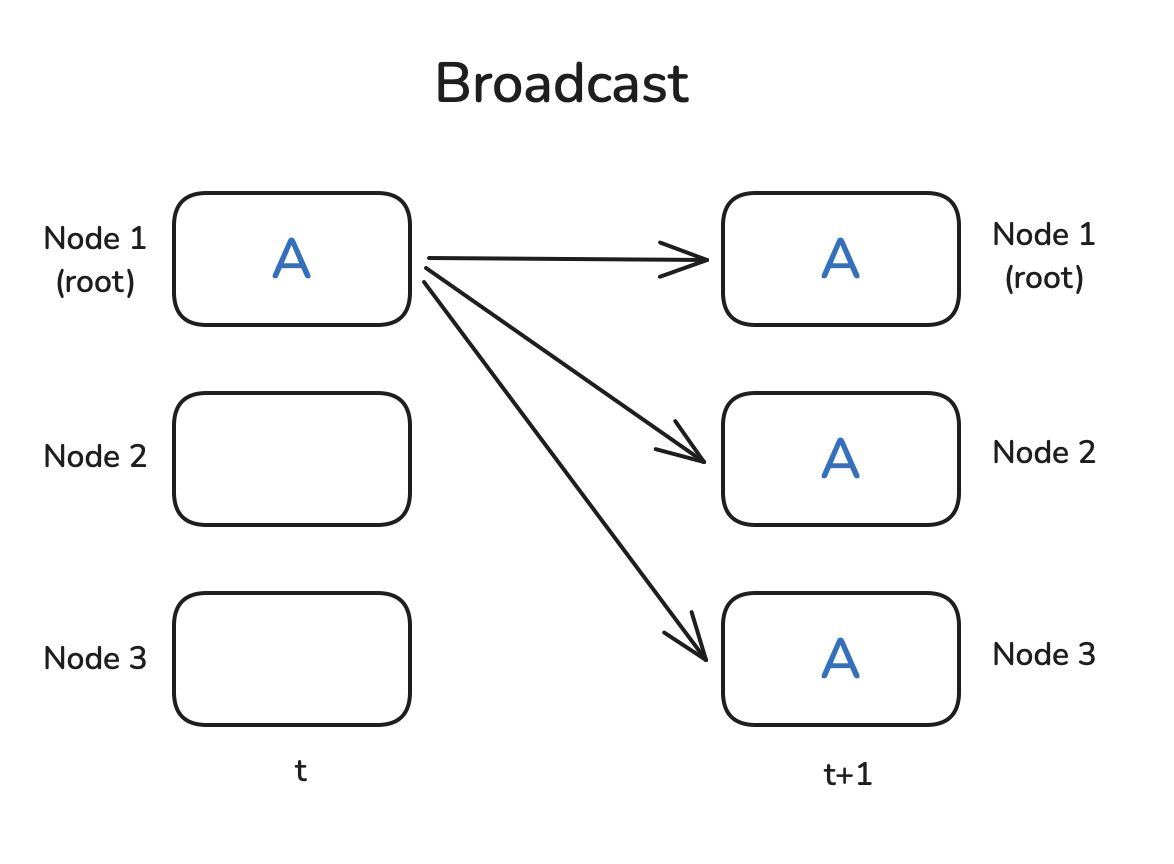
Broadcast: One worker sends the same data to all others (including itself).
- Use case: Send initial weights from rank 0 to all.
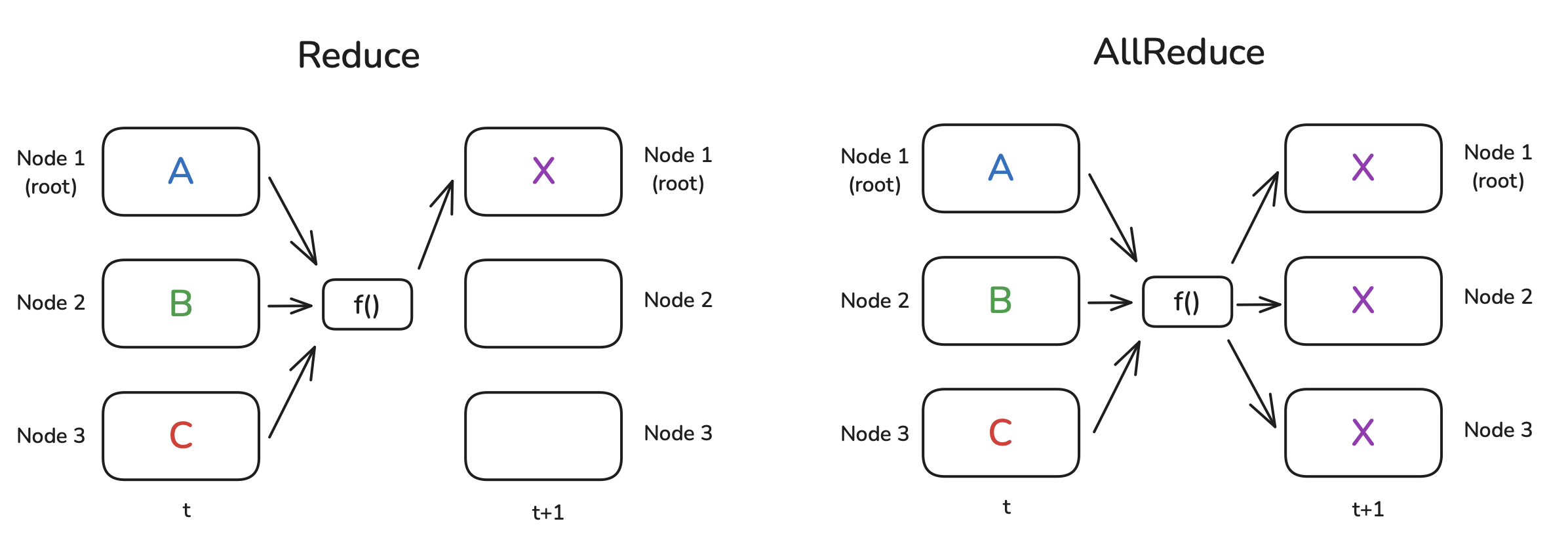
Reduce: Collect data from all workers, apply an operation (SUM, AVG), store result on one destination worker.
- Use case: Aggregate partial results onto one worker.
AllReduce: Like Reduce, but the final result is distributed back to all workers.
- Use case: Average gradients across all workers in Data Parallelism.
Slide 18: Primitives 2: Gather/AllGather & Scatter/ReduceScatter
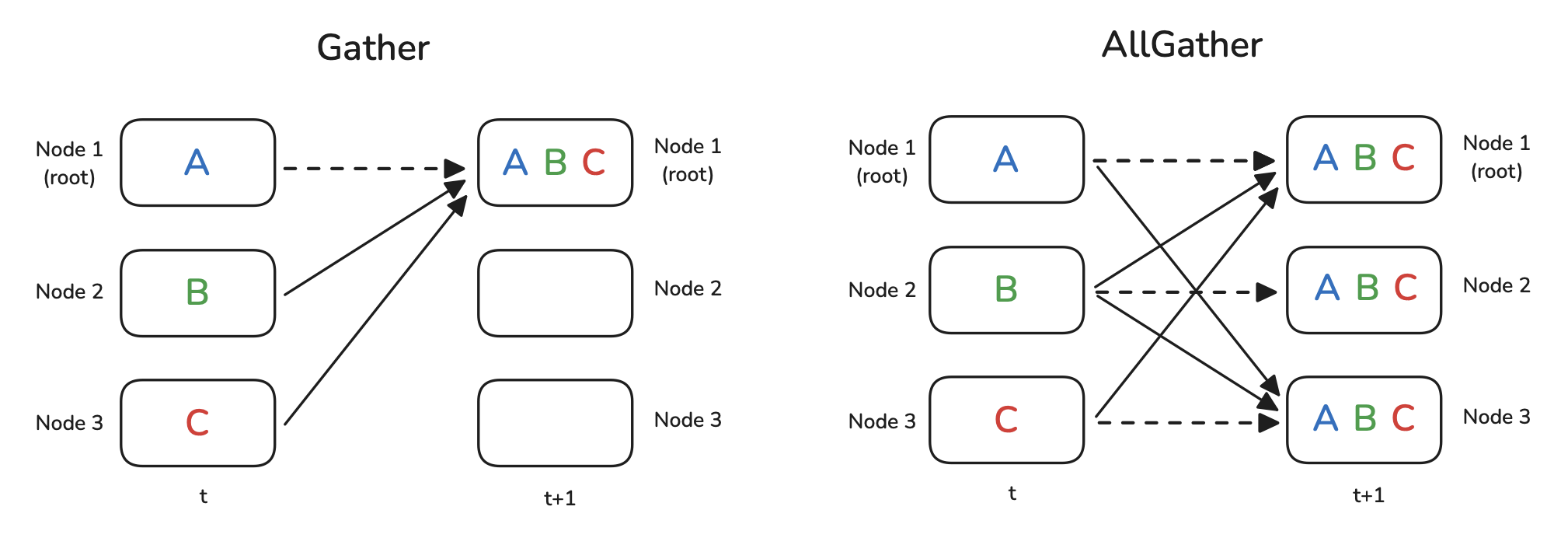
Gather: Collect different data chunks from each worker onto one destination worker.
- Use case: Collect results from different workers.
AllGather: Like Gather, but the collected result (all chunks) is distributed back to all workers.
- Use case: Reconstruct a full tensor from shards held by different workers (ZeRO).
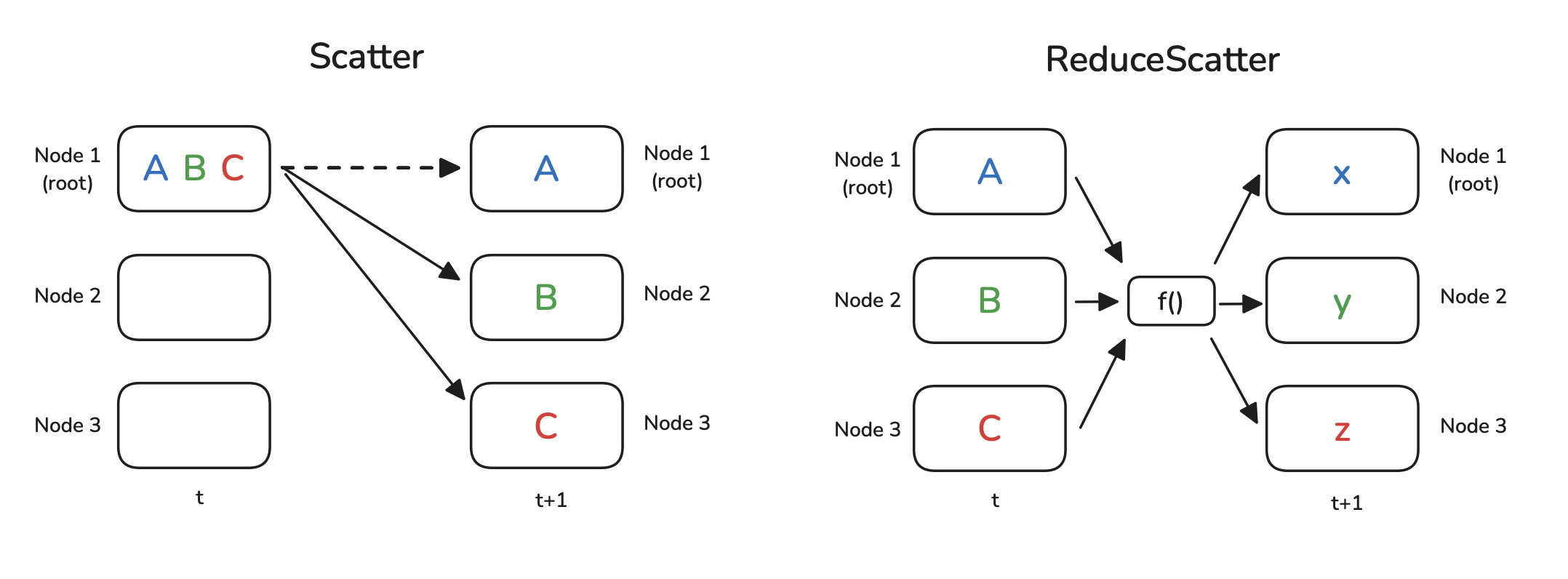
Scatter: One source worker sends different chunks of data to each worker. (Inverse of Gather).
- Use case: Distribute parts of a dataset.
ReduceScatter: Combine Reduce and Scatter. Reduce corresponding chunks from all workers, then Scatter the reduced chunk $j$ only to worker $j$.
- Use case: Compute and distribute sharded average gradients (ZeRO).
Slide 19: Primitives 3: Barrier & AlltoAll (Mentioned Later)
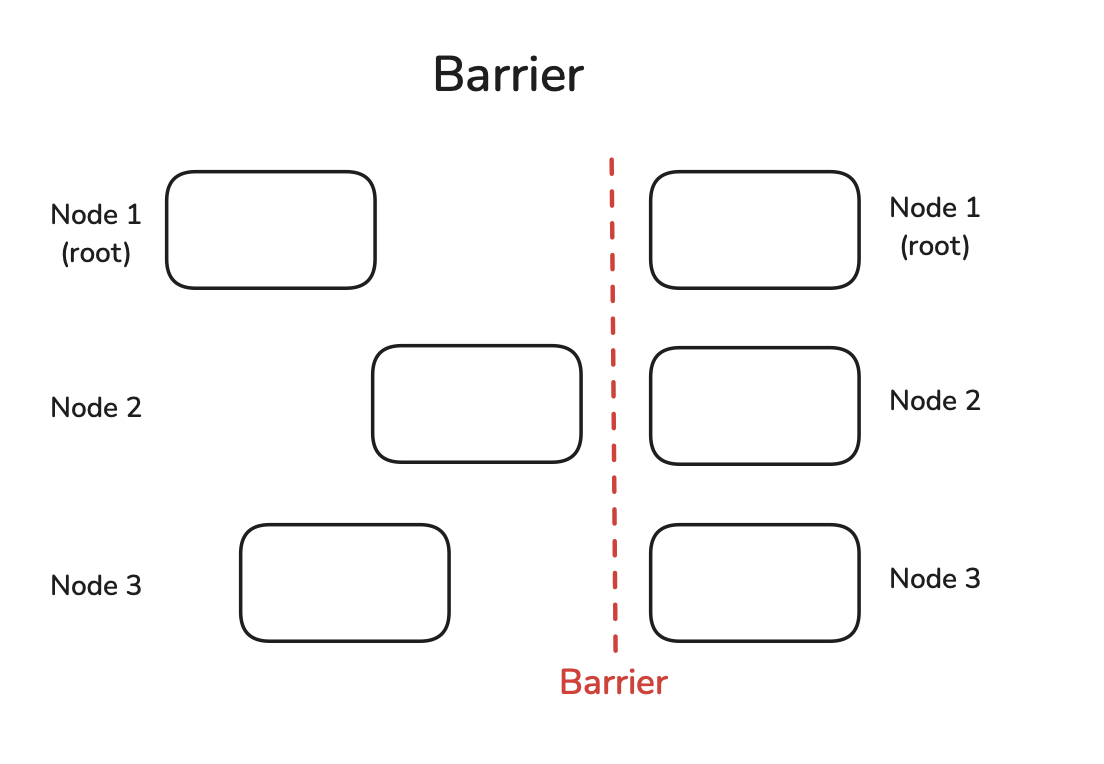
Barrier: Synchronization point. All workers wait here until everyone arrives.
- Use case: Ensure a stage is complete everywhere before proceeding. (Use sparingly - can cause waiting).
(Preview) AlltoAll: Each worker sends different data to every other worker. Worker $i$ sends chunk $j$ to worker $j$. Complex permutation.
- Use case: Routing tokens to specific “expert” networks in MoE models (Expert Parallelism).
A helpful visualization
Visualization for DP, FSDP, and TP
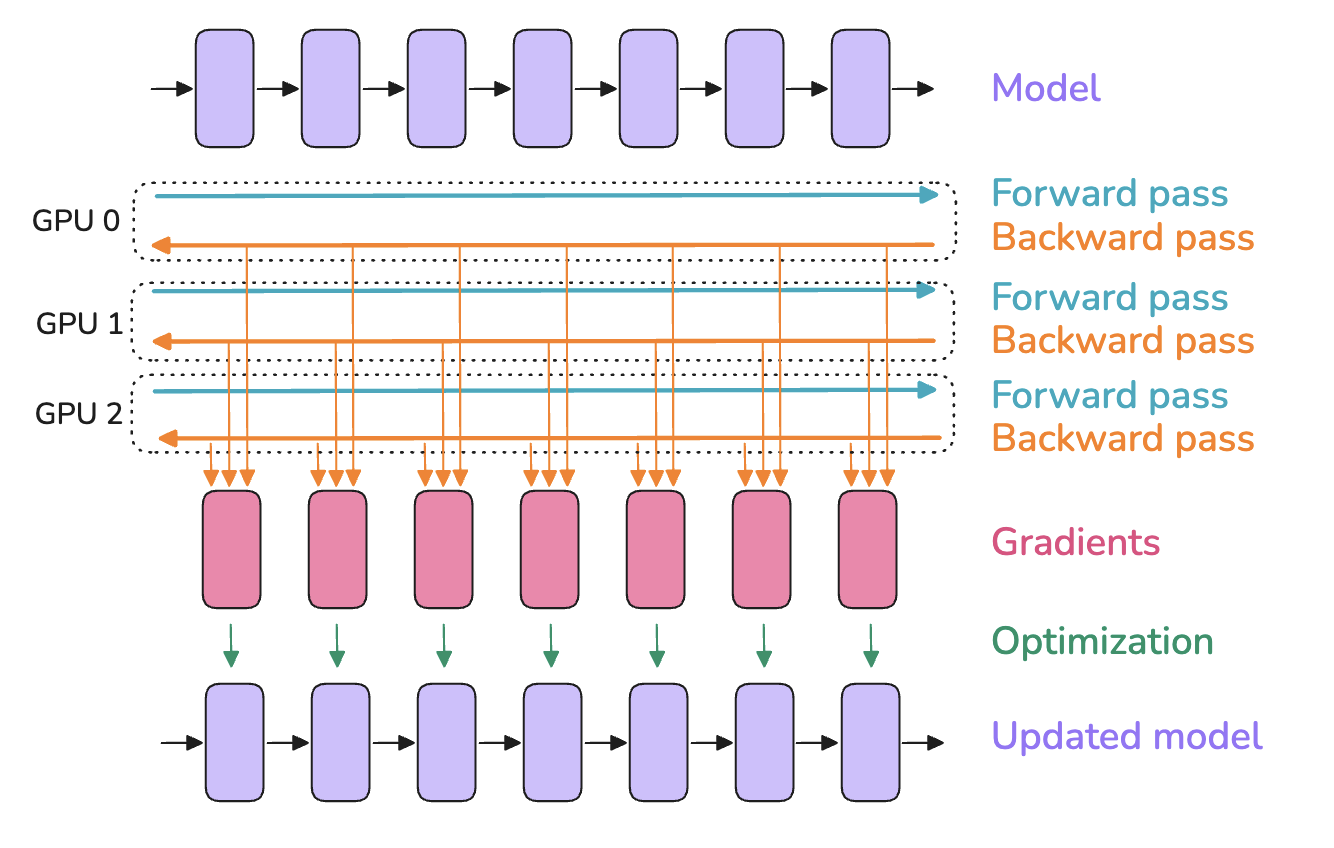
Slide 20: Parallelism Strategy 1: Data Parallelism (DP)
What: Replicate the entire model on each of $N_d$ workers. Split the data batch across workers. Why: Increase training throughput by processing more data in parallel. Simplest parallel strategy.
How:
- Each worker $k$ gets a micro-batch $\mathcal{B}_k$.
- Forward pass on $\mathcal{B}_k$ using local model $w \rightarrow$ Compute loss.
- Backward pass $\rightarrow$ Compute local gradient $g_k$.
- Synchronize Gradients: Average gradients across all workers: $\hat{g} = \frac{1}{N_d} \sum_k g_k$. Use
AllReduce. - Each worker updates its local model copy using the same average gradient $\hat{g}$. $w_{t+1} = \text{OptimizerStep}(w_t, \hat{g})$.
Reference: Playbook Section
Slide 21: DP Optimizations: Overlap & Bucketing
Problem: Waiting for AllReduce is slow. Communication cost scales with model size $|w|$.
Solution 1: Overlap Communication & Computation:
- Start AllReduce for gradients of later layers while backward pass computes gradients for earlier layers.

Solution 2: Gradient Bucketing:
- Group gradients into larger “buckets”.
- Perform one AllReduce per bucket instead of per tensor.
- Reduces communication call overhead, improves bandwidth use, enables better overlap.

Slide 22: DP Concept: Gradient Accumulation
Purpose: Simulate a larger effective batch size without increasing memory per worker.
How:
- Divide worker’s data $\mathcal{B}_k$ into $A$ smaller “accumulation micro-batches” $\mathcal{B}_{k,a}$.
- For $a = 1$ to $A$:
- Forward/Backward on $\mathcal{B}_{k,a}$ to get gradient $g_{k,a}$.
- Accumulate gradients locally: $g_{k}^{(A)} = \sum_{a=1}^A g_{k,a}$.
- Crucially: NO gradient synchronization (AllReduce) for steps $a=1..A-1$. (Use framework tools like
no_sync()).
- After step A: Perform one AllReduce on the accumulated gradients $g_{k}^{(A)}$.
- Perform one optimizer step using the final averaged gradient.
Trade-off: Saves memory, but takes $A$ times longer computationally for the same amount of data compared to a single large batch.
Slide 23: DP Limitations
The Big Problem: Memory Redundancy!
- Every worker stores:
- Full Model Parameters ($w$)
- Full Optimizer States ($\text{OptState}$ - e.g., Adam moments, often 2x parameter size!)
- Full Gradients ($g_k$) (at least temporarily)
- Activations ($A_k$) for its micro-batch.
- Memory usage per worker does not decrease as you add more workers ($N_d$).
- DP alone cannot train a model that doesn’t fit on a single GPU.
Communication Bottleneck: AllReduce cost scales with model size $|w|$ and can limit scaling as $N_d$ increases.
Slide 24: Parallelism Strategy 2: ZeRO (Zero Redundancy Optimizer)
What: Enhance Data Parallelism by partitioning (sharding) model state (Optimizer States, Gradients, Parameters) across DP workers ($N_d$). Eliminates memory redundancy. Why: Train much larger models under DP by reducing memory per worker.
Core Idea: Worker $k$ only owns and updates shard $(k)$ of the state.
Reference: Playbook Section
Slide 25: ZeRO Stage 1 (ZeRO-1): Partition Optimizer States
- Partitions: Optimizer States ($\text{OptState}^{(k)}$).
- Replicates: Parameters ($w$), Gradients ($g_k$).
How:
- Fwd/Bwd: Compute full local gradient $g_k$.
- Sync/Shard Gradients:
ReduceScattersums gradients and gives worker $k$ only its needed shard $\hat{g}^{(k)}$. - Optimizer Step: Worker $k$ updates only its parameter shard $w^{(k)}$ using $\hat{g}^{(k)}$ and local $\text{OptState}^{(k)}$.
- Sync Parameters:
AllGathercollects updated $w^{(k)}$ from all workers to reconstruct the full $w$ on every worker for the next step.
Memory Saved: Optimizer states (often the largest part!). Communication: Replaces 1 AllReduce with ReduceScatter + AllGather. Reference: Playbook Section
Slide 26: ZeRO Stage 2 (ZeRO-2): Partition Gradients Too
- Partitions: Optimizer States ($\text{OptState}^{(k)}$), Gradients ($\hat{g}^{(k)}$).
- Replicates: Parameters ($w$) (temporarily during compute).
How:
- Fwd: Compute activations $A_k$.
- Bwd & Shard Gradients: As gradients are computed,
ReduceScatterthem immediately. Worker $k$ only stores the final, averaged shard $\hat{g}^{(k)}$. (Avoids storing full $g_k$). - Optimizer Step: Update $w^{(k)}$ using $\hat{g}^{(k)}$ and $\text{OptState}^{(k)}$.
- Sync Parameters:
AllGatherreconstructs full $w$.
Memory Saved: Optimizer states + Gradients. Communication: Still ReduceScatter + AllGather. Reference: Playbook Section
Slide 27: ZeRO Stage 3 (ZeRO-3 / FSDP): Partition Parameters Too
- Partitions: Optimizer States ($\text{OptState}^{(k)}$), Gradients ($\hat{g}^{(k)}$), Parameters ($w^{(k)}$).
- Replicates: Nothing persistently!
How:
- Forward Pass (Per Layer/Block):
AllGatherparameters needed for the current layer ($W_j$) just before use.- Compute forward pass $A_j = f_j(A_{j-1}; W_j)$.
- Discard non-owned parameter shards immediately after use.
- Backward Pass (Per Layer/Block):
AllGatherparameters $W_j$ again.- Compute gradients.
ReduceScattergradients immediately, worker $k$ keeps only $\hat{g}_j^{(k)}$.- Discard non-owned parameter shards.
- Optimizer Step: Update local parameter shard $w^{(k)}$ using $\hat{g}^{(k)}$ and $\text{OptState}^{(k)}$. (No final parameter AllGather needed).


Memory Saved: Maximum savings - scales memory per worker by $1/N_d$. Communication: Many AllGathers (params) + ReduceScatters (grads) throughout fwd/bwd. Needs good overlap! Reference: Playbook Section
Slide 28: ZeRO Summary & Trade-offs
 (Shows theoretical memory reduction per stage vs DP size N_d)
(Shows theoretical memory reduction per stage vs DP size N_d)
Pros:
- Massive memory savings for model state ($w, g, \text{OptState}$), enabling huge models via DP.
- ZeRO-3 offers maximum savings.
Cons:
- Increased communication volume compared to standard DP. Replaces one AllReduce with potentially many collectives (ReduceScatter, AllGather).
- Efficiency relies heavily on overlapping communication with computation.
- Does NOT partition activation memory $A_k$! Still need Activation Recomputation if activations are the bottleneck.
Slide 29: Parallelism Strategy 3: Tensor Parallelism (TP)
What: Parallelize within a single layer (e.g., matrix multiply). Partition tensors and computation across $N_{tp}$ workers. Why:
- Layer parameters/activations too large for one GPU.
- Accelerate computation within a layer.
Common Approach: Split weight matrices
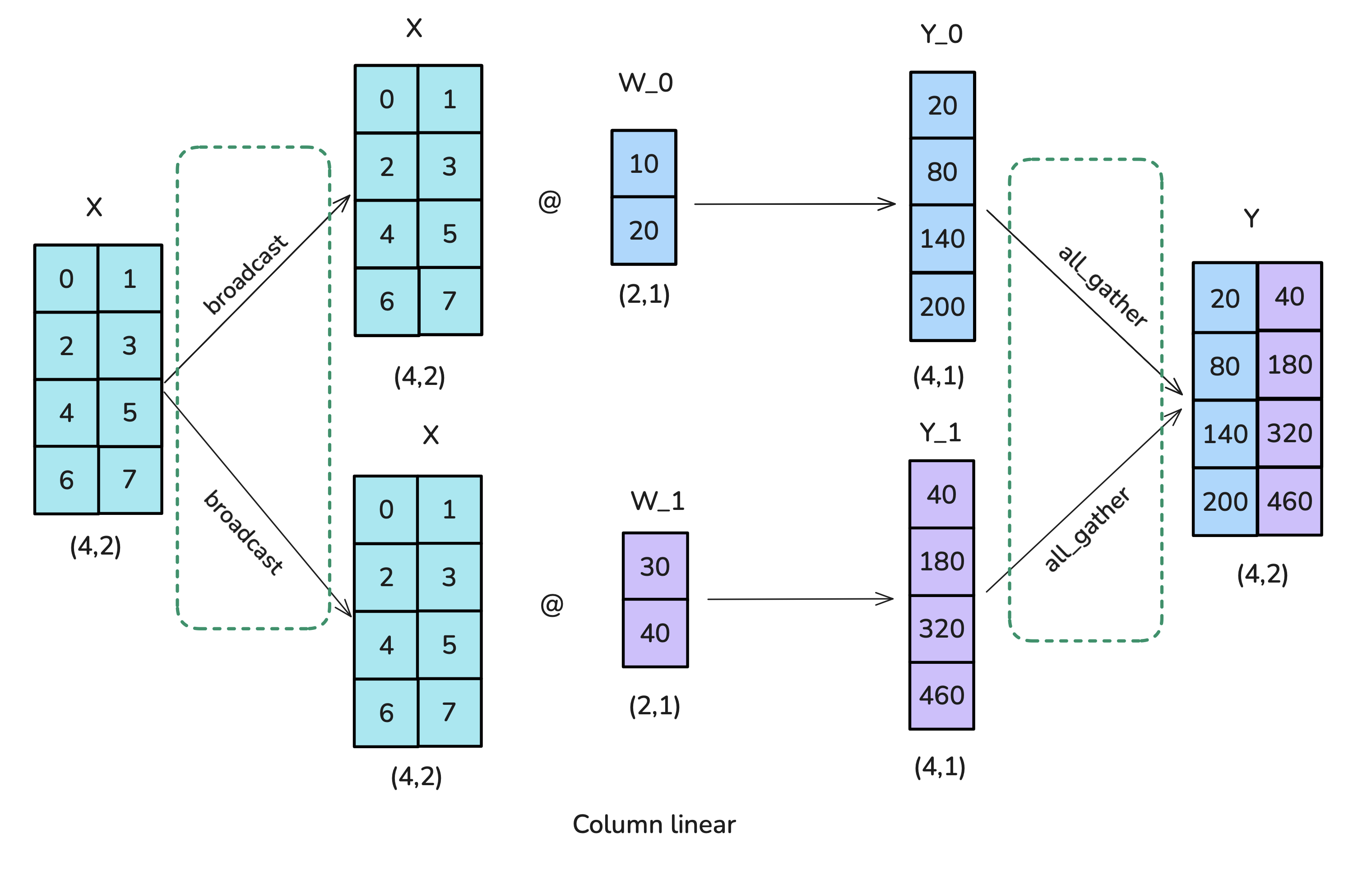
-
Column Parallelism: Split weight $A$ column-wise $ [A_1 | … | A_{N_{tp}}]$. Each worker computes $Y_k = f(X A_k)$. Output $Y$ is $[Y_1 | … | Y_{N_{tp}}]$ distributed across workers. Needs AllReduce in backward pass for $\nabla_X$.
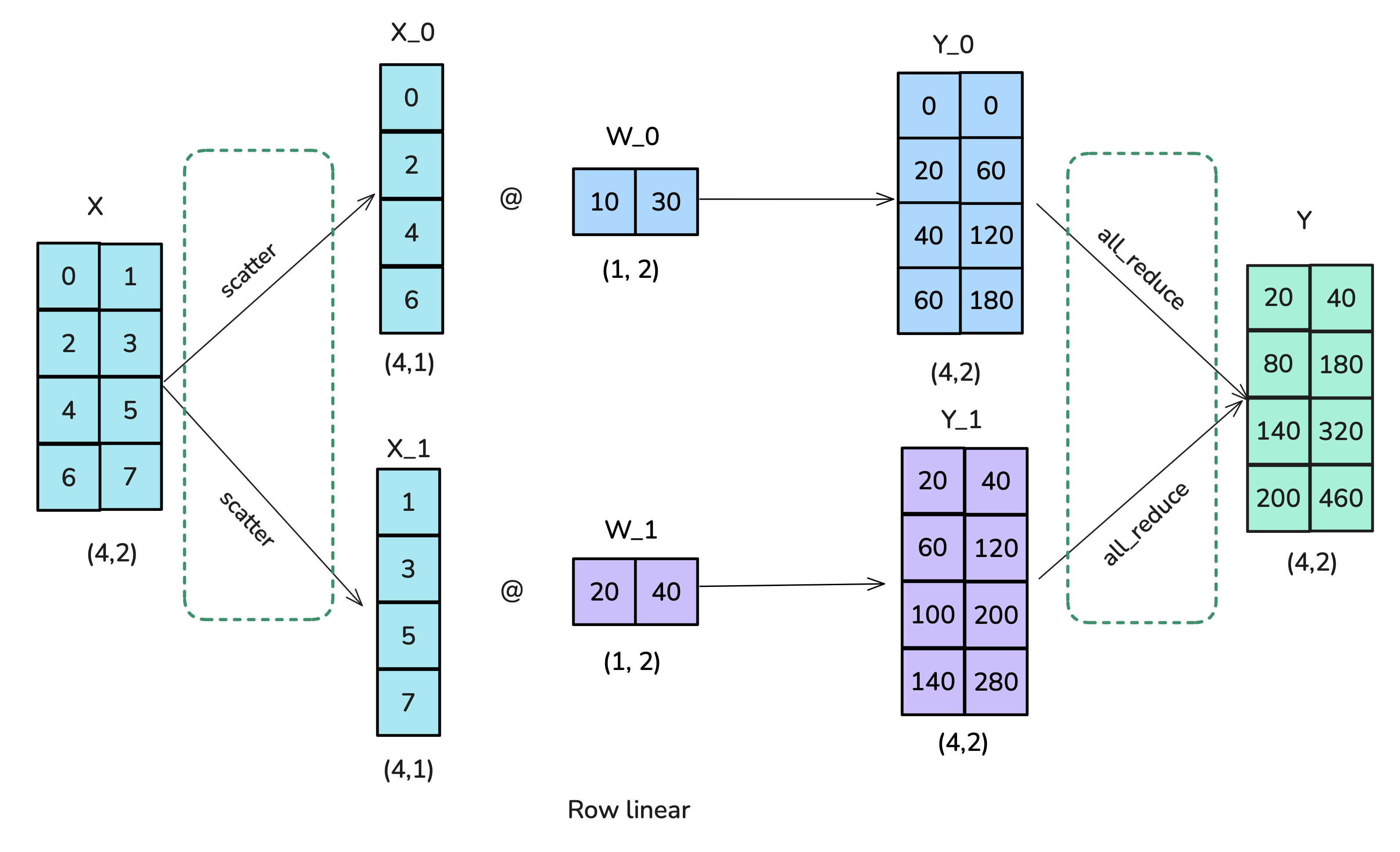
-
Row Parallelism: Split weight $A$ row-wise $ [A_1^T | … | A_{N_{tp}}^T]^T$. Input $X$ must also be sharded $[X_1 | … | X_{N_{tp}}]$. Each worker computes $Y_k = f(X_k A_k)$. Final output $Y = \sum Y_k$ requires
AllReducein forward pass.
Reference: Playbook Section
Slide 30: TP Applied to Transformers (FFN & MHA)
Goal: Minimize communication between operations.
FFN ($Y = f(XW_1)W_2$):
- $W_1$ (expand): Column Parallelism. Input $X$ (replicated), Output $f(Z)$ sharded along intermediate dim $d_{ff}$.
- $W_2$ (contract): Row Parallelism. Input $f(Z)$ (sharded), Output $Y_k$ partial.
- Final $Y = \sum Y_k$ via
AllReduce.- Key: No communication needed between $W_1$ and $W_2$!
MHA:
- $W_Q, W_K, W_V$: Column Parallelism. Input $X$ (replicated), Outputs $Q_k, K_k, V_k$ sharded (effectively sharding heads).
- Attention Calc: If $N_{tp}$ divides num heads $a$, each worker computes attention for its local heads using $Q_k, K_k, V_k$. No communication needed here! (Efficient “Head-wise Parallelism”). Output $Attn_k$ sharded.
- $W_O$: Row Parallelism. Input $Attn_k$ (sharded), Output $Z_k$ partial.
- Final MHA Output $Y = \sum Z_k$ via
AllReduce.
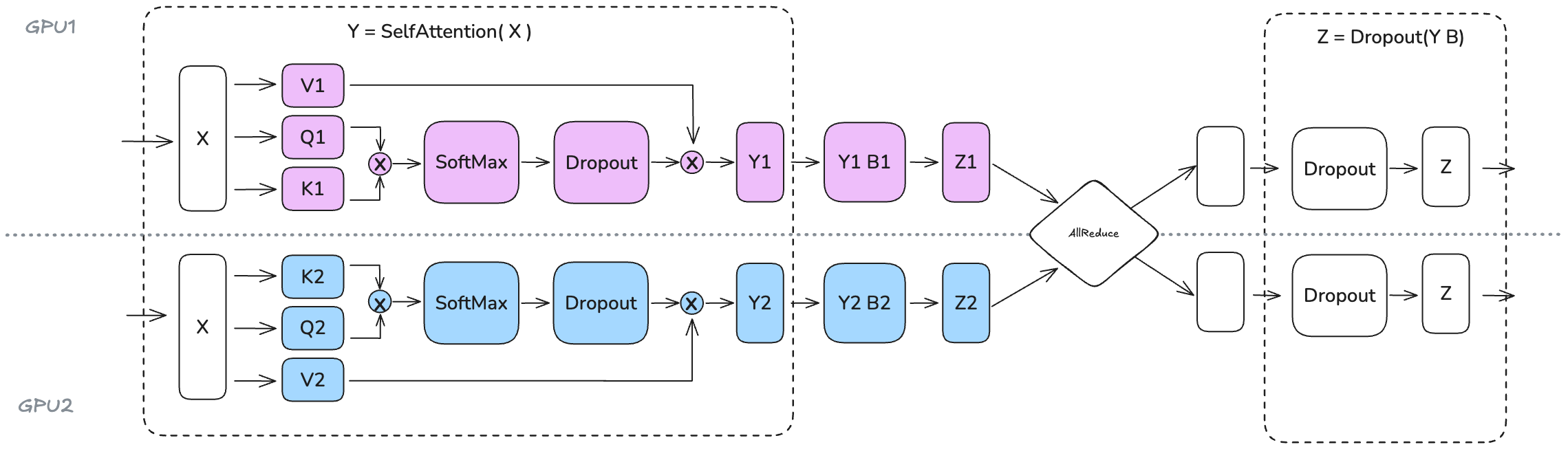 (Shows Column for QKV, local attn, Row for Output proj -> AllReduce. Shows Col for FFN1, Row for FFN2 -> AllReduce)
(Shows Column for QKV, local attn, Row for Output proj -> AllReduce. Shows Col for FFN1, Row for FFN2 -> AllReduce)
Slide 31: TP Trade-offs
Pros:
- Reduces memory per worker for $w, g, \text{OptState}$ and Activations $A$ (for the parallelized layers).
- Can speed up computation if communication overhead is low.
Cons:
- High Communication Frequency: Requires AllReduce within layer computations.
 (Shows communication cannot be fully overlapped)
(Shows communication cannot be fully overlapped) - Needs very high-bandwidth, low-latency interconnect (e.g., NVLink within a node). Usually limited to small $N_{tp}$ (e.g., <= 8).
- Increases implementation complexity.
- Doesn’t parallelize all operations easily (e.g., LayerNorm requires full hidden dim).
Slide 32: Parallelism Strategy 4: Sequence Parallelism (SP)
What: Optimization used with Tensor Parallelism (TP) to reduce activation memory further. Why: TP shards along hidden dim $h$. Operations like LayerNorm, Dropout work on full $h$, preventing activation sharding there. SP shards along sequence dim $s$ for these ops.
How: Requires communication to switch sharding:
- SP Region (e.g., LayerNorm): Input $X$ sharded along $s$. Compute LN locally.
- Transition SP -> TP (
g): UseAllGatheralong $s$ to get full tensor $Y$ (replicated) needed for TP’s column-parallel input. - TP Region (e.g., FFN): Compute TP ops (Col-Linear -> Row-Linear). Output is partial $W_k$, sharded along $h$.
- Transition TP -> SP (
g*): UseReduceScatteralong $s$. This sums partial $W_k$ (completing TP’s Row-Linear) AND scatters result along $s$. Output $W^*$ is sharded along $s$. - SP Region (e.g., Dropout): Apply Dropout locally to sequence-sharded $W^*$.
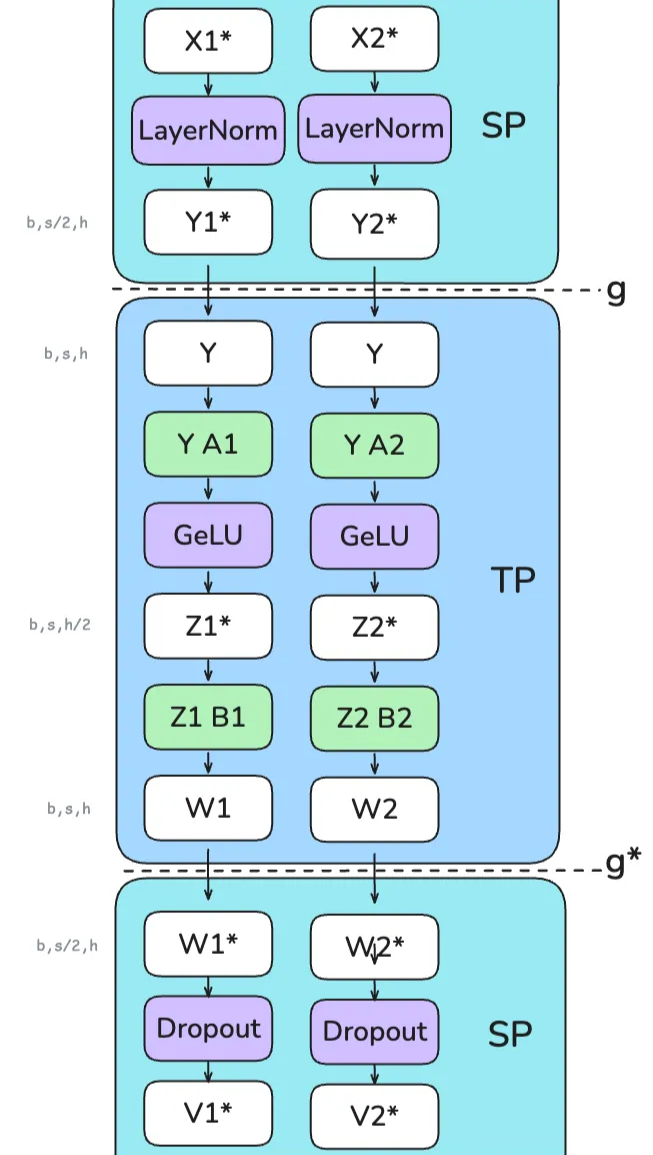
Benefit: Reduces peak activation memory by avoiding full $b \times s \times h$ tensor for LN/Dropout. Adds complexity. Communication volume similar to TP, uses AllGather/ReduceScatter instead of AllReduce. Still needs fast interconnect. Reference: Playbook Section
Slide 33: Parallelism Strategy 5: Context Parallelism (CP) & Ring Attention
What: Partition the sequence dimension $s$ globally across $N_{cp}$ workers for most computations. Why: Handle extremely long sequences ($s$) where activations ($b \times s \times h$) become prohibitive, especially in attention ($s^2$).
How:
- Worker $k$ holds sequence chunk $X_k \in \mathbb{R}^{b \times (s/N_{cp}) \times h}$.
- FFN, LN are local.
- Challenge: Attention needs all Keys ($K$) and Values ($V$).
- Solution: Ring Attention:
- Workers arranged in a ring.
- Repeat $N_{cp}-1$ times:
- Send current K/V chunk to next worker (async).
- Compute partial attention with local Q and current K/V chunk (overlap).
- Receive K/V chunk from previous worker (blocking). Update current K/V.
Communication: Point-to-point K/V passing + final gradient AllReduce across $N_{cp}$.
Reference: Playbook Section
Slide 34: CP Challenge: Load Balancing with Causal Masks
Problem: With causal masks (attend only to past) + naive sequential partitioning, workers with early chunks do much less work than workers with late chunks. Bad load imbalance!
 (Shows GPU1 has few calcs, GPU4 has many)
(Shows GPU1 has few calcs, GPU4 has many)
Solution: ZigZag Partitioning:
- Assign sequence chunks non-contiguously, mixing early/late tokens on each worker.
- Balances the computation load across all $N_{cp}$ workers.
 (Shows computation more evenly distributed)
(Shows computation more evenly distributed)
Benefit: Enables training on very long sequences. Adds complexity to attention.
Slide 35: Parallelism Strategy 6: Pipeline Parallelism (PP)
What: Partition the model layers sequentially into $P$ stages. Stage $p$ runs on worker(s) $p$. Data flows $1 \rightarrow 2 \rightarrow … \rightarrow P$. Why:
- Model parameters $|w|$ too large for single device / TP group.
- Scale across many nodes (TP needs fast intra-node links, PP tolerates slower inter-node links).
How: Stage $p$ computes $A_p = f_p(A_{p-1}; w_p)$. Output $A_p$ is sent to stage $p+1$.
Problem: Pipeline Bubble: Naive sequential execution leaves most stages idle.
 (Shows large grey idle areas)
(Shows large grey idle areas)
Reference: Playbook Section
Slide 36: PP Scheduling: Reducing the Bubble
Idea: Split batch $\mathcal{B}$ into $m$ micro-batches ($\mathcal{B}^{(j)}$). Process them concurrently in the pipeline.
Schedule 1: All-Forward-All-Backward (AFAB / GPipe):
- All micro-batches do full forward pass ($F_1..F_P$).
- Then all micro-batches do full backward pass ($B_P..B_1$).
- Simple, but needs to store activations for all $m$ micro-batches. High activation memory ($\propto m$). Bubble size $\approx (P-1)/m$.

Schedule 2: One-Forward-One-Backward (1F1B / Interleaved):
- Interleave Fwd/Bwd passes more tightly. Start backward pass for micro-batch $j$ as soon as its forward pass finishes.
- Reduces peak activation memory ($\propto P$). Bubble size $\approx (P-1)/m$. More complex.

(Advanced): Interleaved Stages, ZeroBubble schedules exist - more complex, aim for zero bubble.
Slide 37: PP Trade-offs
Pros:
- Partitions very deep models across many devices/nodes.
- Communication (activations/gradients between stages) is less bandwidth-intensive than TP/FSDP collectives, suitable for inter-node networks.
Cons:
- Pipeline Bubble: Inherent inefficiency, limits perfect scaling. Requires large $m$ (many micro-batches, often via gradient accumulation) to amortize.
- Requires careful load balancing (each stage should take similar time).
- Choice of schedule impacts memory and complexity.
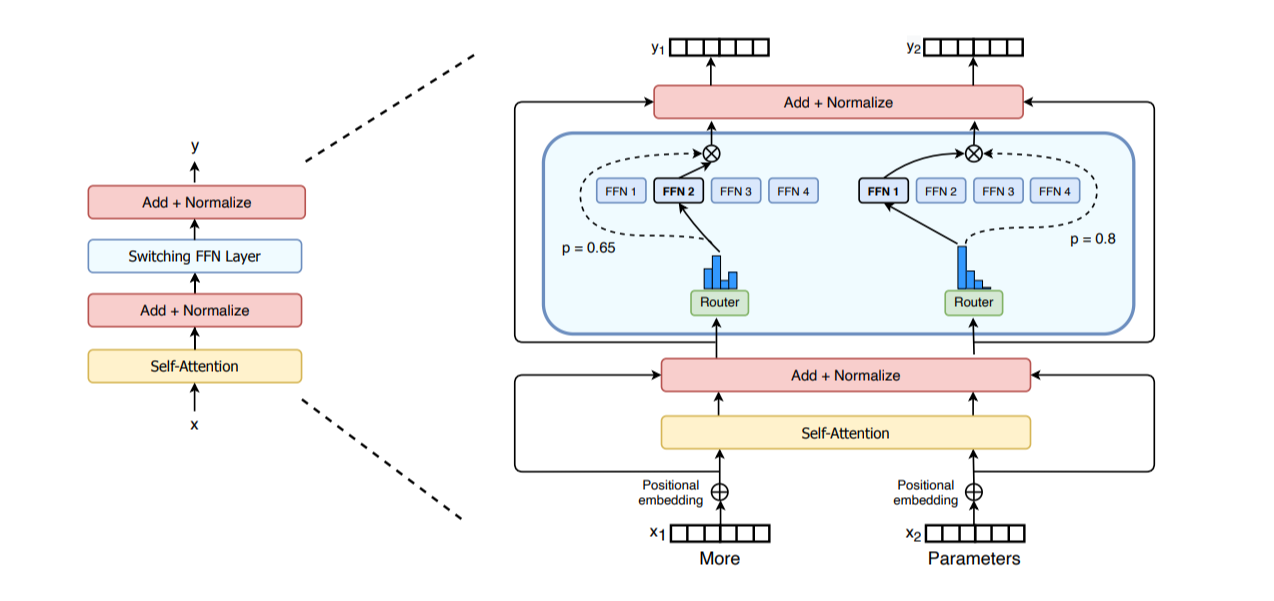
Slide 38: Parallelism Strategy 7: Expert Parallelism (EP)
What: Specialized strategy for Mixture-of-Experts (MoE) models ONLY. Why: Scale models to huge parameter counts by having many specialized “expert” networks (e.g., FFNs), but only activating a few per token.
MoE Layer:
- Replace FFN with $E$ expert FFNs ${f_{e}}$.
- Gating network $R(x_t)$ picks 1 or 2 experts for each token $x_t$.
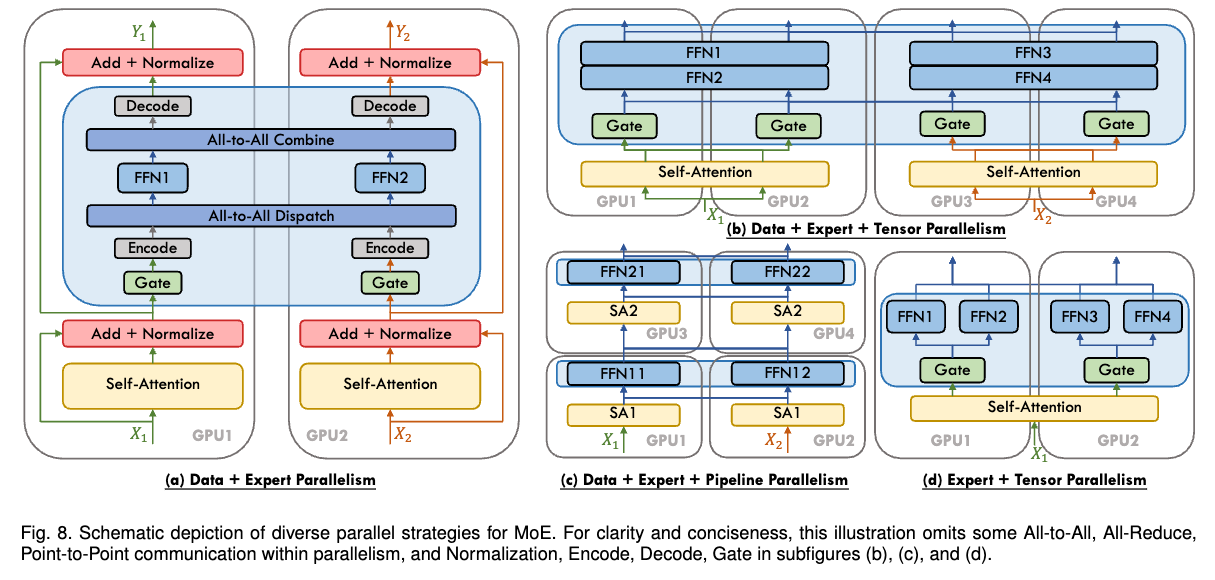
How EP Works:
- Distribute $E$ experts across $N_{ep}$ workers. Worker $k$ holds experts $E_k$.
- Gating selects expert $e(x_t)$ for token $x_t$.
AlltoAll: Route token $x_t$ to the worker holding expert $e(x_t)$.- Worker computes expert output $y_t = f_{e(x_t)}(x_t)$.
AlltoAll: Route output $y_t$ back to original worker.
Reference: Playbook Section
Slide 39: EP Trade-offs & Combination with DP
Pros:
- Massive parameter scaling with relatively low compute cost per token (sparse activation).
Cons:
- Only for MoE models.
- High Communication Cost:
AlltoAllis communication-intensive, can be a bottleneck. Requires high bisection bandwidth. - Load balancing challenges (if some experts are chosen more often).
Combination with DP:
- EP alone only parallelizes MoE layers. Non-expert layers are replicated.
- Almost always used with DP ($N_d$ workers) in a 2D grid ($N_d \times N_{ep}$).
- EP happens across workers in a DP group (row).
- DP happens across workers holding the same expert shards (column).
Slide 40: Combining Strategies: The Need for Hybrid Parallelism
No Silver Bullet! Each strategy has strengths and weaknesses.
- DP/ZeRO: Scales data throughput, limited by activation memory (DP) or communication (ZeRO).
- TP/SP/CP: Reduces activation/param memory per device, needs fast interconnect, limited scalability.
- PP: Scales deep models across nodes, suffers from bubble.
- EP: Scales MoE parameters, needs AlltoAll.
Solution: Combine them! Leverage hardware topology.
Common Combo: 3D Parallelism ($N = N_d \times P \times N_{tp}$)
- TP ($N_{tp}$): Within a node (uses NVLink). Partitions layers/activations.
- PP ($P$): Across nodes (uses inter-node network). Partitions layers sequentially.
- DP ($N_d$): Across nodes/racks. Replicates the PP+TP setup, processes different data.
Reference: Playbook Section
Slide 41: Role of FSDP (ZeRO-3) in Combined Strategies
- In 3D (or higher) parallelism, the “DP” dimension ($N_d$) is often implemented using FSDP (ZeRO-3) instead of standard DP.
- Why? FSDP shards parameters/gradients/optimizer states across the $N_d$ replicas.
- Benefit: Drastically reduces memory per worker compared to replicating the model state in standard DP. Allows fitting much larger models within the combined (FSDP + PP + TP) setup.
PP vs. FSDP Parameter Partitioning:
- PP: Partitions layer-wise into sequential stages. Worker $p$ holds full parameters $w_p$ for its layers. Communicates activations. Sensitive to bubble (needs high grad_acc $m$).
- FSDP: Partitions parameter-wise across DP workers. Worker $k$ holds shards $w^{(k)}$ from all layers. Communicates parameter shards (
AllGather). Sensitive to overlap (needs large micro-batchmbsor sequence lengths).
(Combining PP and FSDP is possible but complex, needs large global batch size).
Slide 42: Adding CP & EP to the Mix (Conceptual 5D)
- CP (Context Parallelism): Added when sequences ($s$) are very long. Typically partitions along DP or PP dimension workers, adds Ring Attention communication.
- EP (Expert Parallelism): Added only for MoE models. Distributes experts, often along DP dimension workers, adds
AlltoAllcommunication.
 (Conceptual diagram showing how DP, PP, TP, EP, CP dimensions relate)
(Conceptual diagram showing how DP, PP, TP, EP, CP dimensions relate)
Slide 43: Summary Table of Parallelism Strategies
 (The table summarizing What, Granularity, Communication, Pros, Cons for DP, ZeRO, PP, TP, EP)
(The table summarizing What, Granularity, Communication, Pros, Cons for DP, ZeRO, PP, TP, EP)
Key Takeaway: Choosing the right mix depends on model size, architecture (MoE?), sequence length, hardware (GPU memory, interconnects), and desired batch size.
Slide 44: Finding the Best Configuration (Iterative Process)
General Approach: (From Playbook)
- Fit in Memory:
- Start with minimal setup (1 node).
- Add necessary partitioning: TP (intra-node), PP (inter-node), FSDP (across DP dim) until model parameters fit. Use ZeRO stage appropriate for memory needs.
- Use Activation Recomputation aggressively if activations are the bottleneck.
- Scale Batch Size:
- Increase DP/FSDP degree ($N_d$).
- Use Gradient Accumulation ($A$) to reach target global batch size ($GBS = N_d \times \text{per_replica_batch} \times A$).
- Add CP if sequence length ($s$) is limiting factor.
- Optimize Throughput (MFU/TFLOPS):
- Tune micro-batch sizes (for PP schedule, FSDP overlap).
- Maximize TP degree within node constraints.
- Balance PP stages for minimal bubble.
- Profile and identify communication vs. computation bottlenecks.
Reference: Playbook Section
Slide 45: Conclusion
- Training large Transformers requires overcoming single-device memory/compute limits.
- Activation Memory is often the primary bottleneck, addressed by Activation Recomputation.
- Parallelism Strategies distribute the workload:
- DP/FSDP: Distributes data/model state.
- TP/SP/CP: Distributes layer computation / activations.
- PP: Distributes layers sequentially.
- EP: Distributes MoE experts.
- State-of-the-art training uses combinations (e.g., FSDP + PP + TP) tailored to the model and hardware.
- Understanding communication primitives (
AllReduce,AllGather, etc.) and trade-offs (memory vs. compute vs. communication) is crucial. - Resources like the Ultrascale Playbook are invaluable guides.